Dron hecho con impresora 3D y Microbit
Voy a hacer un diario sobre cómo llevamos a cabo la idea de manejar un dron casero con Microbit y Makecode: cultura maker en el aula a todo trapo. En algún momento (en algún artículo) de este blog os compartiré el tutorial de Tinkercad y el modelo en .stl para imprimir directamente.
Idea original
La idea surge de las experiencias que ofrecemos como mentores en el programa Código Escuela 4.0. Nosotros asesoramos en la programación, la robótica y el pensamiento computacional, tratando de dar un sentido académico (un contexto). Los proyectos que realizamos con la impresora 3D se iban quedando pequeños, y la formación en Microbit y Makecode nos abrió la mente.
Entonces la idea está crear: diseñar un dron en 3D, imprimirlo y hacerlo funcionar con una tarjeta microbit.
Premisas con el dron
A la hora de ponerme a diseñar, ha habido unas obligaciones de inicio, y otras que hemos ido viendo con las pruebas de cada diseño:
- Usar una tarjeta microbit para controlar el dron. Está es la fundamental, para que los alumnos echen humo dando vueltas a la programación con Makecode. El tener que usar una tarjeta microbit nos obliga a: usar una tarjeta de expansión para poder controlar los motores. Elegir bien la batería para que aguante la microbit y los motores (y que no pese mucho).
- Hacer un diseño "en una pieza" para que no sea más complejo con las conexiones y enganches. Y con esto también va que este diseño en una pieza entre entero en la cama de la impresora 3D.
- Intentar que no sea un modelo demasiado sencillo: cables ocultos, carcasa que tape la caja y que pueda motivar por su diseño. Si se quiere un diseño minimalista en el que la microbit y la batería se unan con una brida hay muchos por internet:
Fase inicial
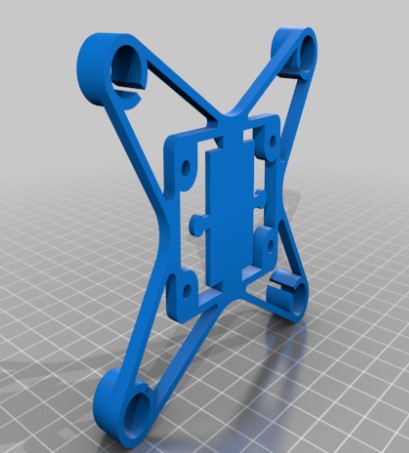
El diseño no se ha elegido previamente, si no que nos ha ido eligiendo a nosotros. En un primer lugar una caja incluiría las tarjetas, y los brazos irían pegados a la caja. Pero al imprimirlo vimos que los brazos no tenían suficiente resistencia para aguantar el vuelo.
Así que decidimos hacer unos brazos completos, en forma de X, e incrustarlos en la caja. Además, la batería debía ir debajo de la caja para facilitar el centro de gravedad.
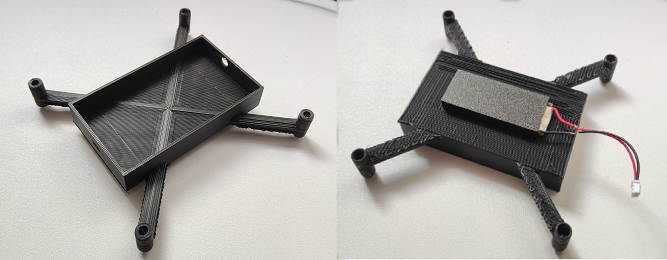
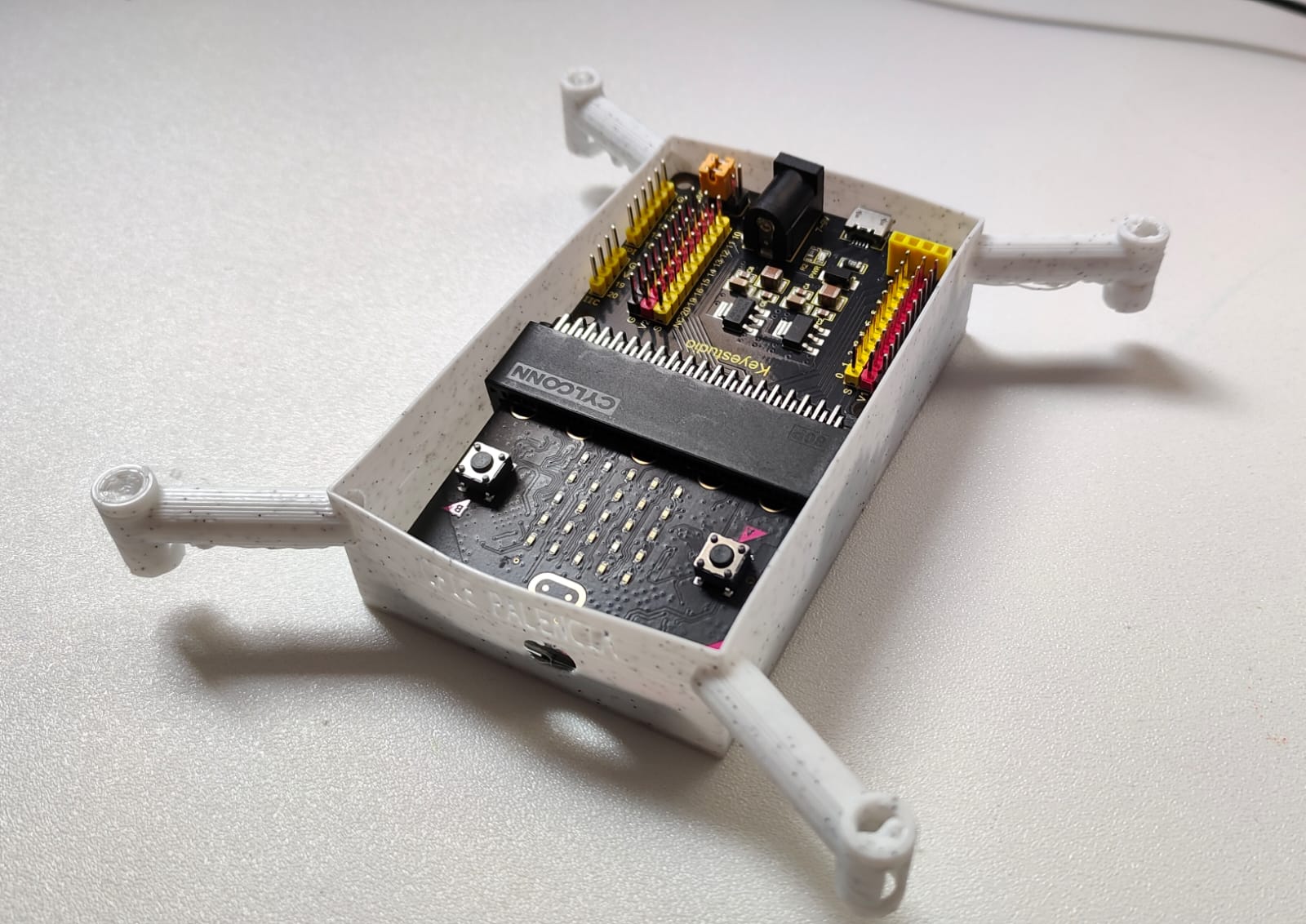
Con este modelo vi la dificultad para la higiene del cableado (o "cómo esconder los cables"). Así que modifiqué el modelo. Decidí meter la batería en la caja, y ampliar el morro en forma redondeada para dar espacio a los cables. Encima de la batería irían las tarjetas.
Los cables de los motores, para quedar escondidos por completo, no deberían salir del cilindro del motor, y debería ir por dentro del eje hasta directamente la caja.

Y aunque este no es el modelo final que usaremos en los institutos, os muestro cómo quedaría con los motores e88 y las hélices. El cableado de los motores es más que difícil de meter en los ejes (por eso y otras razones no será el modelo definitivo). Pero para lo siguiente... En un nuevo artículo.

Puedes la continuación AQUÍ